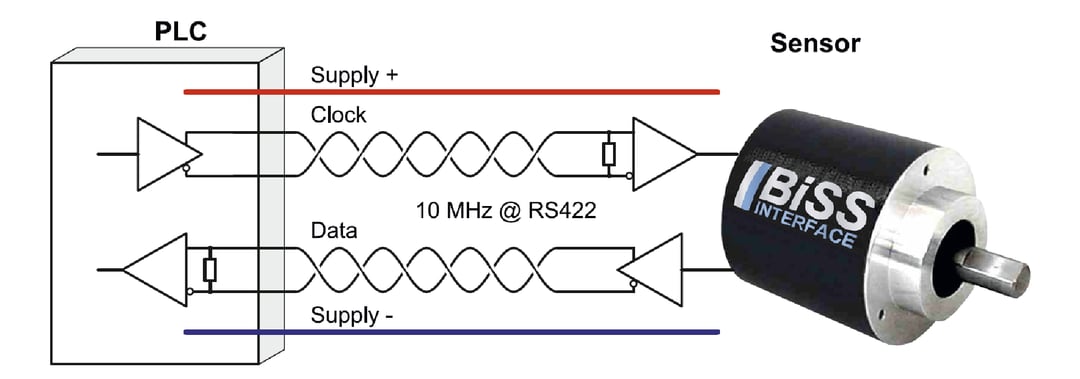
BiSS frame and features
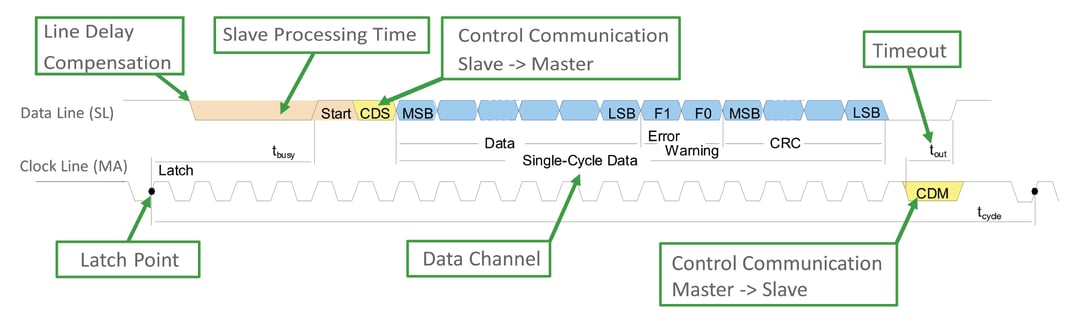
Figure 2. BiSS Frame and Features. Image courtesy BiSS Association e.V.
Latch point
Sensor data is simultaneously captured for all slaves in the daisy chain.
Line delay compensation
The BiSS master measures and compensates the total line delay in every frame. The line delay is measured from 2nd rising clock edge (MA) to falling data line edge (SL) and takes aging and temperature effects into account.
Slave processing time
In a point-to-point topology the slave delays the Start bit, if it requires time to prepare and provide its sensor data.
Data channel
Sensor and actuator data are transmitted as part of a data channel. Each data channel is defined by its communication parameters, e.g. transmission direction (sensor or actuator data), data length (0...64 bit), CRC polynomial. The BiSS master is configured accordingly to ensure proper communication.
Control communication
BiSS enables a bidirectional control communication via its unidirectional clock (MA) and data line (SL). In each frame the master sends one control data bit to the slave (CDM) and the slave responds accordingly (CDS). This in-band protocol can be used to perform register accesses to the slave without interrupting sensor data transfer. For example, it enables reading a sensor’s electronic datasheet, its temperature register or sensor calibration.
Timeout
Each BiSS frame is terminated by the slave’s timeout (stretching 0 at the end of the frame). The timeout is either a constant period (typically about 20μs) or depends on the clock frequency applied to MA (adaptive timeout). With the adaptive timeout, the timeout period is reduced at high frequencies.