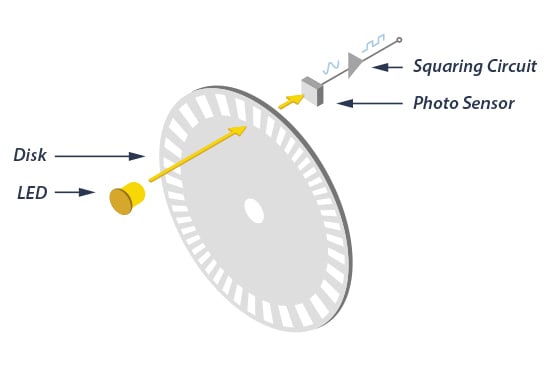
How a Square Wave Is Produced
As seen in Figure 1, a beam of light emitted from an LED passes through a transparent disk patterned with opaque lines The light beam is picked up by a photodiode array, also known as a photosensor. The photosensor responds to the light beam, producing a sinusoidal wave form, which is transformed into a square wave or pulse train. This pulse signal is then sent to the counter or controller, which will then send the signal to produce the desired function.
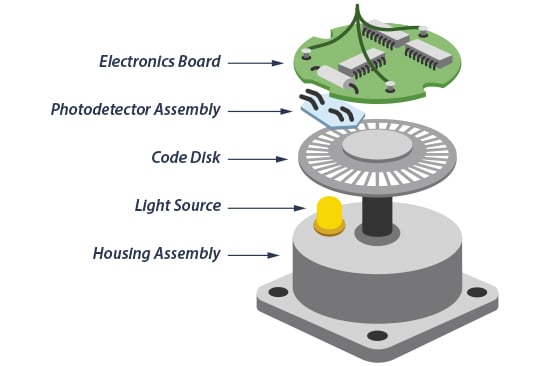
Figure 1 diagrams a typical rotary encoder. Incremental encoders can provide a once-per-revolution pulse (often called the index, marker, or reference) that occurs at the same mechanical point of the encoder shaft revolution. This pulse is on a separate output channel (Z) from the signal channel or quadrature outputs. The index pulse is often used to position motion control applications to a known mechanical reference.
Resolution
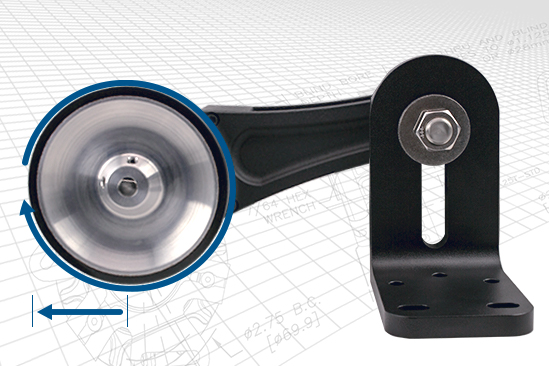
Resolution is a term used to describe the Cycles Per Revolution (CPR) for incremental encoders. Each incremental encoder has a defined number of cycles that are generated for each 360 degree revolution of the shaft. These cycles are monitored by a counter or motion controller and converted to counts for position or velocity control. Figure 2, at right, shows how the whole encoder comes together.