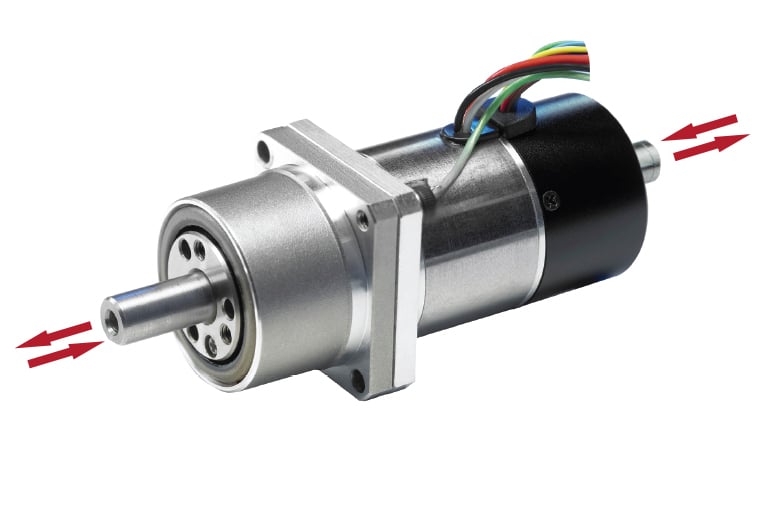
Axial Motor Shaft Movement (End Float or End Play)
End float refers to the amount of axial movement in the motor shaft. There are a number of factors that can contribute to axial motor shaft movement including part tolerances, bearing pre-load method, thermal expansion, and bearing wear over time. When a modular encoder is mounted, the amount of end float directly affects the encoder’s air-gap (the distance between the sensor and the disk).
It can be difficult to obtain end float specifications from the motor manufacture, and even when you do, the information may not be completely accurate. Why? Some motor designs mechanically lock the shaft’s axial movement on the feedback end so that end float is minimal. However, other motor designs often use a wave spring washer to take up any excess play and provide a pre-load force to the bearings. In this case, you cannot assume that the end float has been removed by the wave washer, since this is only true until an opposing axial force on the end of the shaft overcomes the spring force of the wave washer allowing the shaft to move. The results on a modular encoder mounted to this shaft could be disastrous, potentially causing the encoder disc to hit the sensor. Two examples where this situation can occur are:
- If a motor shaft is connected to a ball screw and the motor changes direction, the force from the ball screw will also change directions. This alternating force may cause the motor shaft to move axially.
- If a sprocket, pulley, or gear with some side wobble is mounted on the motor shaft, the wobble may cause an alternating axial load to the motor shaft.
Total Indicated Runout (TIR)
Total Indicated Runout (TIR) measures the radial range of shaft movement about its centerline. If an encoder is to be mounted on the motor shaft, TIR should be measured at the point that represents the furthest extent of the encoder case. For example, if the encoder is one inch thick, TIR should be measured about 1” from the motor face. Although many encoders with newer sensor technology will continue to operate as TIR increases beyond the specified tolerance, accuracy will be sacrificed.